0x00 知识预备
Linker是Android系统动态库so的加载器/链接器,要想轻松地理解Android linker的运行机制,我们需要先熟悉ELF的文件结构,再了解ELF文件的装入/启动,最后学习Linker的加载和启动原理。
鉴于ELF文件结构网上有很多资料,这里就不做累述了。
0x01 so的加载和启动
我们知道如果一个APP需要使用某一共享库so的话,它会在JAVA层声明代码:
Static{
System.loadLibrary(“name”);
}
此代码完成library的加载工作。翻看system.loadLibrary的源代码,可以发现:
System.loadLibrary也是一个native方法,它的调用的过程是:
Dalvik/vm/native/java_lang_Runtime.cpp:
Dalvik_java_lang_Runtime_nativeLoad ->Dalvik/vm/Native.cpp:dvmLoadNativeCode
dvmLoadNativeCode
打开函数dvmLoadNativeCode,可以找到以下代码:
……..
handle = dlopen(pathName, RTLD_LAZY); //获得指定库文件的句柄,这个handle是soinfo*
//这个库文件就是System.loadLibrary(pathName)传递的参数
…..
vonLoad = dlsym(handle, "JNI_OnLoad"); //获取该文件的JNI_OnLoad函数的地址
if (vonLoad == NULL) { //如果找不到JNI_OnLoad,就说明这是用javah风格的代码了,那么就推迟解析
LOGD("No JNI_OnLoad found in %s %p, skipping init",pathName, classLoader); //这句话我们在logcat中经常看见!
}else{
….
}
从上面的代码可以看出Android系统加载共享库的关键代码为dlopen函数。这个dlopen函数的代码在bionic/linker/dlfcn.c中:
void* dlopen(const char* filename, int flags) {
ScopedPthreadMutexLocker locker(&gDlMutex);
soinfo* result = do_dlopen(filename, flags);
if (result == NULL) {
__bionic_format_dlerror("dlopen failed", linker_get_error_buffer());
return NULL;
}
return result;
}
此函数主要通过调用do_dlopen函数来返回一个动态链接库的句柄,该句柄为一个soinfo结构体。Soinfo结构体的具体定义在bionic/linker/linker.h中。
继续查看do_dlopen函数,代码在linker.cpp中:
soinfo* do_dlopen(const char* name, int flags) {
if ((flags & ~(RTLD_NOW|RTLD_LAZY|RTLD_LOCAL|RTLD_GLOBAL)) != 0) {
DL_ERR("invalid flags to dlopen: %x", flags);
return NULL;
}
set_soinfo_pool_protection(PROT_READ | PROT_WRITE);
soinfo* si = find_library(name); //查找动态链接库
if (si != NULL) {
si->CallConstructors();
}
set_soinfo_pool_protection(PROT_READ);
return si;
}
显然,重点在find_library函数。此函数代码如下:
static soinfo* find_library(const char* name) {
soinfo* si = find_library_internal(name);
if (si != NULL) {
si->ref_count++;
}
return si;
}
继续往下深入:
static soinfo* find_library_internal(const char* name) {
……..
soinfo* si = find_loaded_library(name); //首先查看这个so是否已经加载,如果已经加载,就返回该so的soinfo
if (si != NULL) {
if (si->flags & FLAG_LINKED) {
return si;
}
DL_ERR("OOPS: recursive link to \"%s\"", si->name);
return NULL;
}
TRACE("[ '%s' has not been loaded yet. Locating...]", name);
si = load_library(name); //说明该so没有被加载,就调用此函数进行加载
if (si == NULL) {
return NULL;
}
// At this point we know that whatever is loaded @ base is a valid ELF
// shared library whose segments are properly mapped in.
TRACE("[ find_library_internal base=%p size=%zu name='%s' ]",
reinterpret_cast<void*>(si->base), si->size, si->name);
if (!soinfo_link_image(si)) { //加载完so后,根据si的反馈进行链接。会在第3节进行详细分析
munmap(reinterpret_cast<void*>(si->base), si->size);
soinfo_free(si);
return NULL;
}
return si;
}
先不去关心那些错误处理信息,我们假设各个函数的返回值均在预期范围内,这个函数的执行流程为:
- 使用find_loaded_library函数在已经加载的动态链接库链表里面查找该动态库。如果找到了,就返回该动态库的soinfo,否则执行第②步;
- 此时,说明指定的动态链接库还没有被加载,就使用load_library函数来加载该动态库。
load_library函数是整个so加载过程的重中之重!它创建了动态链接库的句柄,代码如下:
static soinfo* load_library(const char* name) {
// Open the file.
int fd = open_library(name);
if (fd == -1) {
DL_ERR("library \"%s\" not found", name);
return NULL;
}
// Read the ELF header and load the segments.
ElfReader elf_reader(name, fd);
if (!elf_reader.Load()) {
return NULL;
}
const char* bname = strrchr(name, '/');
soinfo* si = soinfo_alloc(bname ? bname + 1 : name);
if (si == NULL) {
return NULL;
}
si->base = elf_reader.load_start();
si->size = elf_reader.load_size();
si->load_bias = elf_reader.load_bias();
si->flags = 0;
si->entry = 0; //入口函数设为null
si->dynamic = NULL;
si->phnum = elf_reader.phdr_count();
si->phdr = elf_reader.loaded_phdr();
return si;
}
load_library函数的执行过程可以概括如下:
- 使用open_library函数打开指定so文件;
- 创建ElfReader类对象,并通过该对象的load方法,读取Elf文件头,然后通过分析Elf文件来加载各个segments;
- 使用soinfo_alloc函数分配一个soinfo结构体,并为这个结构体中的各个成员赋值。
下面对步骤二加以详细介绍。
1.1 SO文件的读取与加载工作
Linker使用ElfRead类的load函数完成so文件的分析工作。该类的源代码在linker_phdr.cpp中。Load函数代码如下:
bool ElfReader::Load() {
return ReadElfHeader() &&
VerifyElfHeader() &&
ReadProgramHeader() &&
ReserveAddressSpace() &&
LoadSegments() &&
FindPhdr();
}
显然此函数依次调用ReadElfHeader、ReadProgramHeader等函数。
首先,我们需要知道Android系统加载segments的机制:
一个ELF文件的程序头表包含一个或多个PT_LOAD segments,这些segments标志ELF文件中需要被映射到进程空间的区域。每一个可以加载的segment都含有如下重要属性:
p_offset: 段在文件的偏移地址p_filesz:段的大小p_memsz:段在内存中占据的大小(通常大于p_filesz)。p_vaddr: 段的虚拟地址p_flags:段的标记(可读,可写,可执行)
当前,我们忽略p_paddr和p_align成员。
可以加载的segments能在虚拟地址范围[p_vaddr…p_vaddr+p_memsz)以列表的形式展现。其中有如下几个规则:
- 各个segments的虚拟地址范围不可重叠;
- 如果一个segment的
p_filesz小于p_memsz,那么两者之间的额外数据将被初始化为0; - segment的虚拟地址范围的起、始地址不是必须在某一页的边界。两个不同的segments的起、始地址可以在同一页,在这种情况,该页继承后一segment的映射标记(mapping flags)
- 每一个segment实际加载的地址并非p
_vaddr。而是由加载器决定将第一个segment加载到内存中的哪个位置,然后剩下的segments就以第一个segment为参照物,进行加载。比如:
下面是两个loadable segments的信息:
[ offset:0, filesz:0x4000, memsz:0x4000, vaddr:0x30000 ],
[ offset:0x4000, filesz:0x2000, memsz:0x8000, vaddr:0x40000 ],
相当于这两个segments的虚拟地址范围分别为:
0x30000...0x34000
0x40000...0x48000
如果加载器决定将第一个segment加载到0xa0000000的话(通过后面的分析会知道,这个加载地址是在加载程序头部表的时候由系统确定的),那么它们的实际虚拟地址范围就是:
0xa0030000...0xa0034000
0xa0040000...0xa0048000
换句话说,所有的segments的实际加载开始地址与其vaddr的偏差值是固定的(0xa0030000 – 0x30000 = 0xa0040000 – 0x40000)。
但是,在实际情况下,segments的地址并不是在每一页的边界出开始的。考虑到我们只能在页面边界进行内存映射,因此,这就意味着加载地址的偏差bias应当按照如下方法进行计算:
load_bias = phdr0_load_address - PAGE_START(phdr0->p_vaddr)
(#define PAGE_START(x) ((x) & PAGE_MASK)
PAGE_MASK的值一般为0xfffff000。)
所以第一个segment的load_bias= 0xa0030000 – 0x30000&0xfffff000 = 0xa00000000。
这里phdr0_load_address必须以某一页的边界为起始地址,所以该segments的真正内容的开始地址为:
phdr0_load_address + PAGE_OFFSET(phdr0->p_vaddr)
(#define PAGE_OFFSET(x) ((x) & ~PAGE_MASK) 就是x & 0xfff)
注意:ELF要求如下条件,以满足mmap正常工作:
PAGE_OFFSET(phdr0->p_vaddr) == PAGE_OFFSET(phdr0->p_offset)
每一个loadable segments的p_vaddr都必须加上load_bias,其和就是该segments在内存中的实际开始地址。
1.1.1 ReadProgramHeader
理清了Android加载segments的机制,我们就来看linker中的实际代码,先看ReadProgramHeader:
bool ElfReader::ReadProgramHeader() {
phdr_num_ = header_.e_phnum;
……..
ElfW(Addr) page_min = PAGE_START(header_.e_phoff);
ElfW(Addr) page_max = PAGE_END(header_.e_phoff + (phdr_num_ * sizeof(ElfW(Phdr))));
ElfW(Addr) page_offset = PAGE_OFFSET(header_.e_phoff);
phdr_size_ = page_max - page_min;
void* mmap_result = mmap(NULL, phdr_size_, PROT_READ, MAP_PRIVATE, fd_, page_min);
……..
phdr_mmap_ = mmap_result;
phdr_table_ = reinterpret_cast<ElfW(Phdr)*>(reinterpret_cast<char*>(mmap_result) + page_offset);
return true;
}
- 首先读取elf文件的程序头部表项数目
phdr_num; - 然后分别获取程序头部表在页边界对齐后的起始地址
page_min、结束地址page_max和偏移地址page_offset。并根据page_max与page_start计算出程序头部表占据的页面大小phdr_size; - 再以只读模式建立一个私有映射,该映射将elf文件中偏移值为
page_min,大小为phdr_size的区域映射到内存中。将映射后的内存地址赋给phdr_mmap_,简单一句话:将程序头部表映射到内存中,并将内存地址赋值; reinterpret_cast<new_type>(expression),这是c++中的强制类型转换符,类似于(new_type*)(expression)。这里我们对上面红色部分代码加以解释:
(注:红色代码为倒数第三句)
首先reinterpret_cast<char*>(mmap_result):经void*型指针mmap_result强制转换成char*型;
然后reinterpret_cast<char*>(mmap_result) + page_offset:char*型指针+page_offset,表示指向程序头部表真正开始的地方;
最后再将其转换成ElfW(Phdr)*型指针,显然phdr_table_指向程序头部表开始地址。
1.1.2 ReserveAddressSpace
再来看ReserveAddressSpace:
/*预备一块足够大的虚拟地址范围,用来加载所有可加载的segments.我们可以通过mmap创建一个带有PROT_NONE属性的私有匿名内存映射。PROT_NONE表示页不可访问,匿名映射表示映射区不与任何文件关联(要求fd为-1),私有映射表示对该映射区域的写入操作会产生一个映射文件的复制,对此区域做的任何修改够不会写会原来的文件*/
bool ElfReader::ReserveAddressSpace() {
ElfW(Addr) min_vaddr;
load_size_ = phdr_table_get_load_size(phdr_table_, phdr_num_, &min_vaddr);
……..
uint8_t* addr = reinterpret_cast<uint8_t*>(min_vaddr);
int mmap_flags = MAP_PRIVATE | MAP_ANONYMOUS;
void* start = mmap(addr, load_size_, PROT_NONE, mmap_flags, -1, 0);
……..
load_start_ = start;
load_bias_ = reinterpret_cast<uint8_t*>(start) - addr;
return true;
}
这里有一个关键函数phdr_table_get_load_siz:
/*返回ELF文件程序头部表中所指定的所有可加载segments(这些segments可能是非连续的)的区间大小,如果没有可加载的segments,就返回0
如果out_min_vaddr 或 out_max_vadd是非空的,它们就会被设置成将被存储的页的最小/大地址(如果没有可加载segments的话,就设为0) */
size_t phdr_table_get_load_size(const ElfW(Phdr)* phdr_table, size_t phdr_count,
ElfW(Addr)* out_min_vaddr,
ElfW(Addr)* out_max_vaddr) {
ElfW(Addr) min_vaddr = UINTPTR_MAX;
ElfW(Addr) max_vaddr = 0;
bool found_pt_load = false;
for (size_t i = 0; i < phdr_count; ++i) {
const ElfW(Phdr)* phdr = &phdr_table[i];
if (phdr->p_type != PT_LOAD) {
continue;
}
found_pt_load = true;
if (phdr->p_vaddr < min_vaddr) {
min_vaddr = phdr->p_vaddr;
}
if (phdr->p_vaddr + phdr->p_memsz > max_vaddr) {
max_vaddr = phdr->p_vaddr + phdr->p_memsz;
}
}
if (!found_pt_load) {
min_vaddr = 0;
}
min_vaddr = PAGE_START(min_vaddr);
max_vaddr = PAGE_END(max_vaddr);
if (out_min_vaddr != NULL) {
*out_min_vaddr = min_vaddr;
}
if (out_max_vaddr != NULL) {
*out_max_vaddr = max_vaddr;
}
return max_vaddr - min_vaddr;
}
通俗点讲,此函数就是返回ELF文件中包含的可加载segments总共需要占用的空间大小,并设置其最小虚拟地址的值(是页对齐的)。值得注意的是,原函数有4个参数,但是在ReserveAddressSpace中调用该函数时却只传递了3个参数,忽略了out_max_vaddr。在我个人看来是因为已知了out_min_vaddr及两者的差值load_size,所以可以通过out_min_vaddr + load_size来求得out_max_vaddr。
现在回到ReserveAddressSpace函数。求得load_size之后,就需要为这些segments分配足够的内存空间。这里需要注意的是mmap的第一个参数并非为Null,而是addr。这就表示将映射区间的开始地址放在进程的addr地址处(一般不会成功,而是由系统自动分配,所以可以看作是Null),mmap返回实际映射后的内存开始地址start。显然load_bias_ = start – addr就是实际映射内存地址同linker期望的映射地址的误差值。后面的操作中,linker就可以通过p_vaddr + load_bias_来获取某一segments在内存中的开始地址了。
1.1.3 LoadSegments
现在就开始加载ELF文件中的可加载segments了:
bool ElfReader::LoadSegments() {
for (size_t i = 0; i < phdr_num_; ++i) {
const ElfW(Phdr)* phdr = &phdr_table_[i];
if (phdr->p_type != PT_LOAD) {
continue;
}
// Segment addresses in memory.
ElfW(Addr) seg_start = phdr->p_vaddr + load_bias_;
ElfW(Addr) seg_end = seg_start + phdr->p_memsz;
ElfW(Addr) seg_page_start = PAGE_START(seg_start);
ElfW(Addr) seg_page_end = PAGE_END(seg_end);
ElfW(Addr) seg_file_end = seg_start + phdr->p_filesz;
// File offsets.
ElfW(Addr) file_start = phdr->p_offset;
ElfW(Addr) file_end = file_start + phdr->p_filesz;
ElfW(Addr) file_page_start = PAGE_START(file_start);
ElfW(Addr) file_length = file_end - file_page_start;
if (file_length != 0) {
void* seg_addr = mmap(reinterpret_cast<void*>(seg_page_start),
file_length, //是以文件大小为参照,而非内存大小
PFLAGS_TO_PROT(phdr->p_flags),
MAP_FIXED|MAP_PRIVATE,
fd_,
file_page_start);
if (seg_addr == MAP_FAILED) {
DL_ERR("couldn't map \"%s\" segment %zd: %s", name_, i, strerror(errno));
return false;
}
}
/*如果segments可写,并且该segments的实际结束地址不在某一页的边界的话,就将该segments实际结束地址到此页的边界之间的内存全置为0*/
if ((phdr->p_flags & PF_W) != 0 && PAGE_OFFSET(seg_file_end) > 0) {
memset(reinterpret_cast<void*>(seg_file_end), 0, PAGE_SIZE - PAGE_OFFSET(seg_file_end));
}
seg_file_end = PAGE_END(seg_file_end);
// seg_file_end is now the first page address after the file
// content. If seg_end is larger, we need to zero anything
// between them. This is done by using a private anonymous
// map for all extra pages.
if (seg_page_end > seg_file_end) {
void* zeromap = mmap(reinterpret_cast<void*>(seg_file_end),
seg_page_end - seg_file_end,
PFLAGS_TO_PROT(phdr->p_flags),
MAP_FIXED|MAP_ANONYMOUS|MAP_PRIVATE,
-1,
0);
if (zeromap == MAP_FAILED) {
DL_ERR("couldn't zero fill \"%s\" gap: %s", name_, strerror(errno));
return false;
}
}
}
return true;
}
此部分功能很简单:就是将ELF中的可加载segments依次映射到内存中,并进行一些辅助扫尾工作。
1.1.4 FindPhdr
返回程序头部表在内存中地址。这与phdr_table_是不同的,后者是一个临时的、在so被重定位之前会为释放的变量:
bool ElfReader::FindPhdr() {
const ElfW(Phdr)* phdr_limit = phdr_table_ + phdr_num_;
//如果段类型是 PT_PHDR, 那么我们就直接使用该段的地址.
for (const ElfW(Phdr)* phdr = phdr_table_; phdr < phdr_limit; ++phdr) {
if (phdr->p_type == PT_PHDR) {
return CheckPhdr(load_bias_ + phdr->p_vaddr);
}
}
//否则,我们就检查第一个可加载段。如果该段的文件偏移值为0,那么就表示它是以ELF头开始的,我们就可以通过它来找到程序头表加载到内存的地址(虽然过程有点繁琐)。
for (const ElfW(Phdr)* phdr = phdr_table_; phdr < phdr_limit; ++phdr) {
if (phdr->p_type == PT_LOAD) {
if (phdr->p_offset == 0) {
ElfW(Addr) elf_addr = load_bias_ + phdr->p_vaddr;
const ElfW(Ehdr)* ehdr = reinterpret_cast<const ElfW(Ehdr)*>(elf_addr);
ElfW(Addr) offset = ehdr->e_phoff;
return CheckPhdr((ElfW(Addr))ehdr + offset);
}
break;
}
}
DL_ERR("can't find loaded phdr for \"%s\"", name_);
return false;
}
要理解这段代码,我们需要知道段类型PT_PHDR所表示的意义:指定程序头表在文件及程序内存映像中的位置和大小。此段类型不能在一个文件中多次出现。此外,仅当程序头表是程序内存映像的一部分时,才可以出现此段。此类型(如果存在)必须位于任何可装入段的各项的前面。有关详细信息,请参见程序的解释程序。
至此so文件的读取、加载工作就分析完毕了。我们可以发现,Android对so的加载操作只是以段为单位,跟section完全没有关系。另外,通过查看VerifyElfHeader的代码,我们还可以发现,Android系统仅仅对ELF文件头的e_ident、e_type、e_version、e_machine进行验证(当然,e_phnum也是不能错的),所以,这就解释了为什么有些加壳so文件头的section相关字段可以任意修改,系统也不会报错了。
1.2 so的链接机制
在1.1我们详细分析了Android so的加载机制,现在就开始分析so的链接机制。在分析linker的关于链接的源代码之前,我们需要学习ELF文件关于动态链接方面的知识。
1.2.1 动态节区
如果一个目标文件参与动态链接,它的程序头部表将包含类型为PT_DYNAMIC的元素。此“段”包含.dynamic节区(这个节区是一个数组)。该节区采用一个特殊符号_DYNAMIC来标记,其中包含如下结构的数组:
typedef struct {
Elf32_Sword d_tag;
union {
Elf32_Word d_val;
Elf32_Addr d_ptr;
} d_un;
} Elf32_Dyn;
extern Elf32_Dyn _DYNAMIC[]; //注意这里是一个数组
/*注意:
对每个这种类型的对象,d_tag控制d_un的解释含义:
d_val 此 Elf32_Word 对象表示一个整数值,可以有多种解释。
d_ptr 此 Elf32_Addr 对象代表程序的虚拟地址。
关于d_tag的值、该值的意义,及其与d_un的关系,可查看ELF.PDF p24。 */
该Elf32_Dyn数组就是soinfo结构体中的dynamic成员,我们在第2节介绍的load_library函数中发现,si->dynamic被赋值为null,这就说明,在加载阶段是不需要此值的,只有在链接阶段才需要。Android的动态库的链接工作还是由linker完成,主要代码就是在linker.cpp的soinfo_link_image(find_library_internal方法中调用)中,此函数的代码相当多,我们来分块分析:
首先,我们需要从程序头部表中获取dynamic节区信息:
/*in function soinfo_link_image */
/*抽取动态节区*/
size_t dynamic_count;
ElfW(Word) dynamic_flags;
/*这里的si->dynamic 为ElfW(Dyn)指针,就是上面提到的Elf32_Dyn _DYNAMIC[]*/
phdr_table_get_dynamic_section(phdr, phnum, base, &si->dynamic,
&dynamic_count, &dynamic_flags);
此函数很简单:
/*返回ELF文件中的dynamic节区在内存中的地址和大小,如果没有该节区就返回null
* Input:
* phdr_table -> program header table
* phdr_count -> number of entries in tables
* load_bias -> load bias
* Output:
* dynamic -> address of table in memory (NULL on failure).
* dynamic_count -> number of items in table (0 on failure).
* dynamic_flags -> protection flags for section (unset on failure)
*/
void phdr_table_get_dynamic_section(const ElfW(Phdr)* phdr_table, size_t phdr_count,
ElfW(Addr) load_bias,
ElfW(Dyn)** dynamic, size_t* dynamic_count, ElfW(Word)* dynamic_flags) {
const ElfW(Phdr)* phdr = phdr_table;
const ElfW(Phdr)* phdr_limit = phdr + phdr_count;
for (phdr = phdr_table; phdr < phdr_limit; phdr++) {
if (phdr->p_type != PT_DYNAMIC) {
continue;
}
*dynamic = reinterpret_cast<ElfW(Dyn)*>(load_bias + phdr->p_vaddr);
if (dynamic_count) {
*dynamic_count = (unsigned)(phdr->p_memsz / 8);
//这里需要解释下,在2.2.1中我们介绍了Elf32_Dyn的结构,它占8字节。而PT_DYNAMIC段就是存放着Elf32_Dyn数组,所以dynamic_count的值就是该段的memsz/8。
}
if (dynamic_flags) {
*dynamic_flags = phdr->p_flags;
}
return;
}
*dynamic = NULL;
if (dynamic_count) {
*dynamic_count = 0;
}
}
成功获取了dynamic节区信息,我们就可以根据该节区中的Elf32_Dyn数组来进行so链接操作了。我们需要从dynamic节区中抽取有用的信息,linker采用遍历dynamic数组的方式,根据每个元素的flags()进行相应的处理:
/*in function soinfo_link_image */
// 从动态dynamic节区中抽取有用信息
uint32_t needed_count = 0;
//开始从头遍历dyn数组,根据数组中个元素的标记进行相应的处理
for (ElfW(Dyn)* d = si->dynamic; d->d_tag != DT_NULL; ++d) { //标记为 DT_NULL 的项目标注了整个 _DYNAMIC 数组的末端,因此以它为结尾标志。
........
switch (d->d_tag) {
case DT_HASH:
........
break;
case DT_STRTAB:
si->strtab = reinterpret_cast<const char*>(base + d->d_un.d_ptr);
break;
case DT_SYMTAB:
si->symtab = reinterpret_cast<ElfW(Sym)*>(base + d->d_un.d_ptr);
break;
case DT_JMPREL:
#if defined(USE_RELA)
si->plt_rela = reinterpret_cast<ElfW(Rela)*>(base + d->d_un.d_ptr);
#else
si->plt_rel = reinterpret_cast<ElfW(Rel)*>(base + d->d_un.d_ptr);
#endif
break;
case DT_PLTRELSZ:
#if defined(USE_RELA)
si->plt_rela_count = d->d_un.d_val / sizeof(ElfW(Rela));
#else
si->plt_rel_count = d->d_un.d_val / sizeof(ElfW(Rel));
#endif
break;
#if defined(__mips__)
case DT_PLTGOT:
// Used by mips and mips64.
si->plt_got = reinterpret_cast<ElfW(Addr)**>(base + d->d_un.d_ptr);
break;
#endif
........
#if defined(USE_RELA)
case DT_RELA:
si->rela = reinterpret_cast<ElfW(Rela)*>(base + d->d_un.d_ptr);
break;
case DT_RELASZ:
si->rela_count = d->d_un.d_val / sizeof(ElfW(Rela));
break;
case DT_REL:
DL_ERR("unsupported DT_REL in \"%s\"", si->name);
return false;
case DT_RELSZ:
DL_ERR("unsupported DT_RELSZ in \"%s\"", si->name);
return false;
#else
case DT_REL:
si->rel = reinterpret_cast<ElfW(Rel)*>(base + d->d_un.d_ptr);
break;
case DT_RELSZ:
si->rel_count = d->d_un.d_val / sizeof(ElfW(Rel));
break;
case DT_RELA:
DL_ERR("unsupported DT_RELA in \"%s\"", si->name);
return false;
#endif
case DT_INIT: //只有可执行文件才有此节区
si->init_func = reinterpret_cast<linker_function_t>(base + d->d_un.d_ptr);
DEBUG("%s constructors (DT_INIT) found at %p", si->name, si->init_func);
break;
case DT_FINI:
si->fini_func = reinterpret_cast<linker_function_t>(base + d->d_un.d_ptr);
DEBUG("%s destructors (DT_FINI) found at %p", si->name, si->fini_func);
break;
case DT_INIT_ARRAY:
si->init_array = reinterpret_cast<linker_function_t*>(base + d->d_un.d_ptr);
DEBUG("%s constructors (DT_INIT_ARRAY) found at %p", si->name, si->init_array);
break;
case DT_INIT_ARRAYSZ:
si->init_array_count = ((unsigned)d->d_un.d_val) / sizeof(ElfW(Addr));
break;
case DT_FINI_ARRAY:
si->fini_array = reinterpret_cast<linker_function_t*>(base + d->d_un.d_ptr);
DEBUG("%s destructors (DT_FINI_ARRAY) found at %p", si->name, si->fini_array);
break;
case DT_FINI_ARRAYSZ:
si->fini_array_count = ((unsigned)d->d_un.d_val) / sizeof(ElfW(Addr));
break;
case DT_PREINIT_ARRAY:
si->preinit_array = reinterpret_cast<linker_function_t*>(base + d->d_un.d_ptr);
DEBUG("%s constructors (DT_PREINIT_ARRAY) found at %p", si->name, si->preinit_array);
break;
case DT_PREINIT_ARRAYSZ:
si->preinit_array_count = ((unsigned)d->d_un.d_val) / sizeof(ElfW(Addr));
break;
case DT_TEXTREL:
#if defined(__LP64__)
DL_ERR("text relocations (DT_TEXTREL) found in 64-bit ELF file \"%s\"", si->name);
return false;
#else
si->has_text_relocations = true;
break;
#endif
case DT_SYMBOLIC:
si->has_DT_SYMBOLIC = true;
break;
case DT_NEEDED:
++needed_count;
break;
case DT_FLAGS:
if (d->d_un.d_val & DF_TEXTREL) {
........
si->has_text_relocations = true;
}
if (d->d_un.d_val & DF_SYMBOLIC) {
si->has_DT_SYMBOLIC = true;
}
break;
#if defined(__mips__)
case DT_STRSZ:
case DT_SYMENT:
case DT_RELENT:
break;
case DT_MIPS_RLD_MAP:
// Set the DT_MIPS_RLD_MAP entry to the address of _r_debug for GDB.
{
r_debug** dp = reinterpret_cast<r_debug**>(base + d->d_un.d_ptr);
*dp = &_r_debug;
}
break;
case DT_MIPS_RLD_VERSION:
case DT_MIPS_FLAGS:
case DT_MIPS_BASE_ADDRESS:
case DT_MIPS_UNREFEXTNO:
break;
case DT_MIPS_SYMTABNO:
si->mips_symtabno = d->d_un.d_val;
break;
case DT_MIPS_LOCAL_GOTNO:
si->mips_local_gotno = d->d_un.d_val;
break;
case DT_MIPS_GOTSYM:
si->mips_gotsym = d->d_un.d_val;
break;
#endif
default:
DEBUG("Unused DT entry: type %p arg %p",
reinterpret_cast<void*>(d->d_tag), reinterpret_cast<void*>(d->d_un.d_val));
break;
}
}
完成dynamic数组的遍历后,就说明我们已经获取了其中的有用信息了,那么现在就需要根据这些信息进行处理:
/*in function soinfo_link_image */
//再检测一遍,这种做法总是明智的
if (relocating_linker && needed_count != 0) {
DL_ERR("linker cannot have DT_NEEDED dependencies on other libraries");
return false;
}
if (si->nbucket == 0) {
DL_ERR("empty/missing DT_HASH in \"%s\" (built with --hash-style=gnu?)", si->name);
return false;
}
if (si->strtab == 0) {
DL_ERR("empty/missing DT_STRTAB in \"%s\"", si->name);
return false;
}
if (si->symtab == 0) {
DL_ERR("empty/missing DT_SYMTAB in \"%s\"", si->name);
return false;
}
// If this is the main executable, then load all of the libraries from LD_PRELOAD now.
//如果是main可执行文件,那么就根据LD_PRELOAD信息来加载所有相关的库
//这里面涉及到的gLdPreloadNames变量,我们知道在前面的整个分析过程中均没有涉及,这是因为,对于可执行文件而言,它的起始函数并不是dlopen,而是系统内核的execv函数,通过层层调用之后才会执行到linker的linker_init_post_ralocation函数,在这个函数中调用parse_LD_PRELOAD函数完成 gLdPreloadNames变量的赋值
if (si->flags & FLAG_EXE) {
memset(gLdPreloads, 0, sizeof(gLdPreloads));
size_t preload_count = 0;
for (size_t i = 0; gLdPreloadNames[i] != NULL; i++) {
soinfo* lsi = find_library(gLdPreloadNames[i]);
if (lsi != NULL) {
gLdPreloads[preload_count++] = lsi;
} else {
........
}
}
}
//分配一个soinfo*[]指针数组,用于存放本so库需要的外部so库的soinfo指针
soinfo** needed = reinterpret_cast<soinfo**>(alloca((1 + needed_count) * sizeof(soinfo*)));
soinfo** pneeded = needed;
//依次获取dynamic数组中定义的每一个外部so库soinfo
for (ElfW(Dyn)* d = si->dynamic; d->d_tag != DT_NULL; ++d) {
if (d->d_tag == DT_NEEDED) {
const char* library_name = si->strtab + d->d_un.d_val; //根据index值获取所需库的名字
DEBUG("%s needs %s", si->name, library_name);
soinfo* lsi = find_library(library_name); //获取该库的soinfo
if (lsi == NULL) {
........
}
*pneeded++ = lsi;
}
}
*pneeded = NULL;
#if !defined(__LP64__)
if (si->has_text_relocations) {
// Make segments writable to allow text relocations to work properly. We will later call
// phdr_table_protect_segments() after all of them are applied and all constructors are run.
DL_WARN("%s has text relocations. This is wasting memory and prevents "
"security hardening. Please fix.", si->name);
if (phdr_table_unprotect_segments(si->phdr, si->phnum, si->load_bias) < 0) {
DL_ERR("can't unprotect loadable segments for \"%s\": %s",
si->name, strerror(errno));
return false;
}
}
#endif
#if defined(USE_RELA)
if (si->plt_rela != NULL) {
DEBUG("[ relocating %s plt ]\n", si->name);
if (soinfo_relocate(si, si->plt_rela, si->plt_rela_count, needed)) {
return false;
}
}
if (si->rela != NULL) {
DEBUG("[ relocating %s ]\n", si->name);
if (soinfo_relocate(si, si->rela, si->rela_count, needed)) {
return false;
}
}
#else
if (si->plt_rel != NULL) {
DEBUG("[ relocating %s plt ]", si->name);
if (soinfo_relocate(si, si->plt_rel, si->plt_rel_count, needed)) {
return false;
}
}
if (si->rel != NULL) {
DEBUG("[ relocating %s ]", si->name);
if (soinfo_relocate(si, si->rel, si->rel_count, needed)) {
return false;
}
}
#endif
#if defined(__mips__)
if (!mips_relocate_got(si, needed)) {
return false;
}
#endif
si->flags |= FLAG_LINKED;
DEBUG("[ finished linking %s ]", si->name);
#if !defined(__LP64__)
if (si->has_text_relocations) {
// All relocations are done, we can protect our segments back to read-only.
if (phdr_table_protect_segments(si->phdr, si->phnum, si->load_bias) < 0) {
DL_ERR("can't protect segments for \"%s\": %s",
si->name, strerror(errno));
return false;
}
}
#endif
/* We can also turn on GNU RELRO protection */
if (phdr_table_protect_gnu_relro(si->phdr, si->phnum, si->load_bias) < 0) {
DL_ERR("can't enable GNU RELRO protection for \"%s\": %s",
si->name, strerror(errno));
return false;
}
notify_gdb_of_load(si);
return true;
}
0x02 开始执行so文件
上面的find_library_internal函数中的soinfo_link_image函数执行完后就返回到上层函数find_library中,然后进一步返回到do_dlopen函数:
soinfo* do_dlopen(const char* name, int flags) {
if ((flags & ~(RTLD_NOW|RTLD_LAZY|RTLD_LOCAL|RTLD_GLOBAL)) != 0) {
DL_ERR("invalid flags to dlopen: %x", flags);
return NULL;
}
set_soinfo_pool_protection(PROT_READ | PROT_WRITE);
soinfo* si = find_library(name);
if (si != NULL) {
si->CallConstructors();
}
set_soinfo_pool_protection(PROT_READ);
return si;
}
如果获取的si不为空,就说明so的加载和链接操作正确完成,那么就可以执行so的初始化构造函数了:
void soinfo::CallConstructors() {
........
// DT_INIT should be called before DT_INIT_ARRAY if both are present.
//如果文件含有.init和.init_array节区的话,就先执行.init节区的代码再执行.init_array节区的代码
CallFunction("DT_INIT", init_func);
CallArray("DT_INIT_ARRAY", init_array, init_array_count, false);
}
由于我们只分析so库,所以只需要关心CallArray("DT_INIT_ARRAY", init_array, init_array_count, false)函数即可:
void soinfo::CallArray(const char* array_name UNUSED, linker_function_t* functions, size_t count, bool reverse) {
........
//这里的recerse变量用于指定.init_array中的函数是由前到后执行还是由后到前执行。默认是由前到后
int begin = reverse ? (count - 1) : 0;
int end = reverse ? -1 : count;
int step = reverse ? -1 : 1;
for (int i = begin; i != end; i += step) {
TRACE("[ %s[%d] == %p ]", array_name, i, functions[i]);
CallFunction("function", functions[i]); //依次调用init_array中的函数。
}
........
}
这里需要对init_array节区的结构和作用加以说明。
首先是init_array节区的数据结构。该节中包含指针,这些指针指向了一些初始化代码。这些初始化代码一般是在main函数之前执行的。在C++程序中,这些代码用来运行静态构造函数。另外一个用途就是有时候用来初始化C库中的一些IO系统。使用IDA查看具有init_array节区的so库文件就可以找到如下数据:
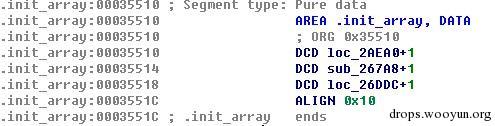
这里共三个函数指针,每个指针指向一个函数地址。值得注意的是,上图中每个函数指针的值都加了1,这是因为地址的最后1位置1表明需要使得处理器由ARM转为Thumb状态来处理Thumb指令。将目标地址处的代码解释为Thumb代码来执行。
然后再来看CallFunction的具体实现:
void soinfo::CallFunction(const char* function_name UNUSED, linker_function_t function) {
//如果函数地址为空或者为-1就直接退出。
if (function == NULL || reinterpret_cast<uintptr_t>(function) == static_cast<uintptr_t>(-1)) {
return;
}
........
function(); //执行该指针所指定的函数
// The function may have called dlopen(3) or dlclose(3), so we need to ensure our data structures
// are still writable. This happens with our debug malloc (see http://b/7941716).
set_soinfo_pool_protection(PROT_READ | PROT_WRITE);
}
至此,整个Android so的linker机制就分析完毕了!